

توضیحات
آموزش ساخت روبات خودران با مسیریابی خودکار در ROS 2
نام دوره : Self Driving and ROS 2 – Learn by Doing! Map & Localization
پیشنیاز
- آشنایی اولیه با Python یا C++
- آشنایی اولیه با لینوکس
- نیازی به دانش قبلی از ROS یا ROS 2 نیست
- نیازی به دانش تئوری روباتیک نیست
- نیازی به سختافزار خاصی نیت. میتوانید تمام دوره را تنها با رایانه دنبال کنید
توضیحات :
آیا میخواهید یک روبات خودران واقعی با استفاده از ROS 2، آخرین نسخه از سیستمعامل روباتیک، بسازید؟
آیا علاقه دارید یادگیری را با مسیریابی خودکار روباتها آغاز کنید و وارد جنبههای تئوری و عملی مکانیابی، نقشهبرداری و SLAM شوید؟
این دوره به شما کمک میکند با تجربه عملی و واقعی، مهارتهای خود را در حوزه روباتیک خودران توسعه دهید و دانش خود را در پروژههای صنعتی به کار ببرید.
فلسفه آموزشی دوره: یادگیری با انجام پروژههای عملی
همانطور که دیل کارنگی، نویسنده و معلم مشهور آمریکایی، میگوید:
یادگیری یک فرآیند فعال است. ما با انجام دادن یاد میگیریم و تنها دانشی که به کار گرفته شود، در ذهن باقی میماند.
در این دوره، شما بهصورت گامبهگام با مفاهیم ROS 2 آشنا میشوید و یاد میگیرید چطور از آن در پروژههای واقعی و حتی فرصتهای شغلی آینده خود استفاده کنید.
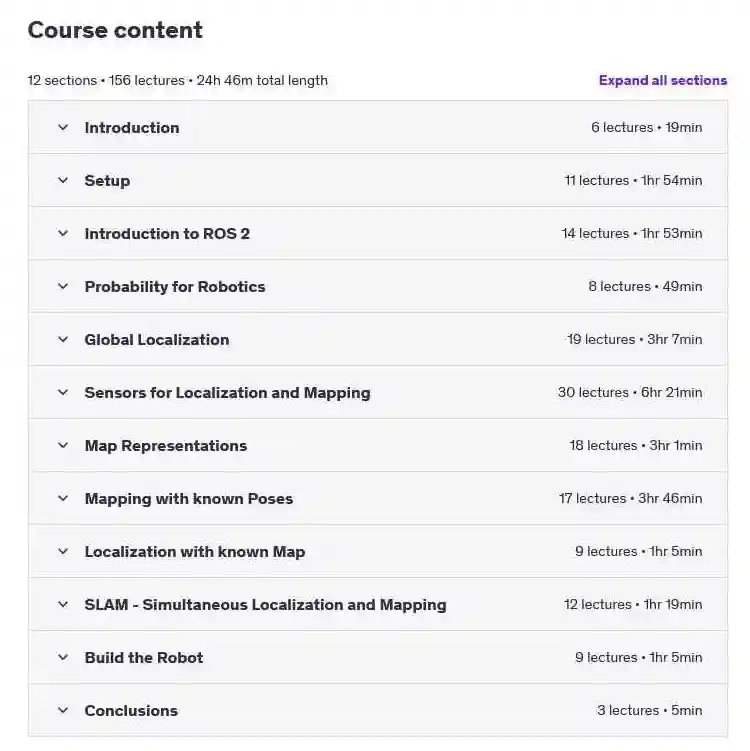
ساختار دوره
هر بخش از این دوره شامل سه قسمت است:
- توضیحات تئوری درباره مفاهیم و عملکردها
- کاربرد مفاهیم در مثالهای ساده عملی
- اجرای مفاهیم در پروژههای واقعی روباتیک
🔧 چرا این دوره خاص است؟
تمام درسهای برنامهنویسی در این دوره به هر دو زبان Python و C++ ارائه میشوند.
این یعنی شما میتوانید زبانی را که با آن راحتتر هستید انتخاب کنید یا در هر دو زبان به توسعهدهنده حرفهای نرمافزار روباتیک تبدیل شوید!
مزایای شرکت در دوره آموزش ساخت روبات خودران با مسیریابی خودکار در ROS 2 :
- یادگیری ساخت روباتهای خودران
- درک مفاهیم پیشرفته مانند SLAM، مکانیابی و نقشهبرداری
- آشنایی با مسیریابی خودکار روباتها
- یادگیری عملی و تئوری ROS 2
- توسعه مهارتهای برنامهنویسی با Python و C++
- بهبود فرصتهای شغلی در حوزه روباتیک
پس از اتمام این دوره چه چیزهایی خواهید آموخت؟
- طراحی و ساخت روباتهای خودران واقعی
- مفاهیم پیشرفته مانند SLAM، مکانیابی و نقشهبرداری
- مسیریابی خودکار با استفاده از ROS 2
- کار با سنسورها و کنترلکنندههای روباتیک
- مهارتهای عملی در برنامهنویسی روباتیک با Python و C++
- اجرای پروژههای واقعی در حوزه روباتیک خودران
دوره آموزش ساخت روبات خودران با مسیریابی خودکار در ROS 2 برای چه کسانی مناسب است؟
- علاقهمندان به روباتهای خودران و مسیریابی خودکار
- سازندگان و علاقهمندان به روباتیک
- توسعهدهندگان نرمافزار که میخواهند ROS 2 و روباتیک را بیاموزند
- دانشجویان و مهندسانی که میخواهند از صفر یک روبات بسازند
- توسعهدهندگانی که با ROS 2 آشنا هستند و میخواهند آن را در پروژههای واقعی به کار گیرند
- مهندسان روباتیک که میخواهند مهارتهای خود را در زمینه SLAM و مکانیابی تقویت کنند
- برنامهنویسان مبتدی Python و C++ که علاقهمند به روباتهای خودران هستند


یودمی ایران –
دوره درخواستی خود را از راه های ارتباطی درخواست کنید