

توضیحات
آموزش پشته ناوبری NAV2 در ROS2 از صفر
نام دوره : ROS2 Nav2 [Navigation 2 Stack] – with SLAM and Navigation
پیش نیاز:
- اوبونتو 22.04 روی رایانه شما نصب شده است
- دانش پایه در خط فرمان لینوکس و برنامه نویسی پایتون
- دانش پایه در ROS2 (خطوط فرمان، موضوعات، نوشتن گره پایتون و غیره)
- بدون نیاز به سخت افزار – می توانید کل دوره را با شبیه سازی Gazebo دنبال کنید!
توضیحات:
شما اصول ROS2 را یاد گرفته اید و می خواهید با SLAM و پشته Navigation 2 شروع کنید؟
یا از قبل شروع کرده اید اما احساس می کنید کاملا گم شده اید؟
در این دوره در نهایت مرحله به مرحله متوجه خواهید شد که پشته Navigation 2 چیست. و شما می توانید این دانش را در پروژه های روباتیک ROS2 خود به کار ببرید.
و برای شروع، نیازی به خرید هیچ سخت افزاری نیست! شما می توانید دوره را با شبیه سازی Gazebo تکمیل کنید.
— چرا دوره آموزش پشته ناوبری NAV2 در ROS2 از صفر ؟
من متوجه شدم که (در حالی که خودم این کار را انجام می دهم) یادگیری پشته ناوبری واقعاً آسان نیست . اگر فکر می کردید که یادگیری ROS2 سخت است، صبر کنید تا با Nav2 شروع کنید!
منابع آنلاین زیادی وجود ندارد، و شروع به کار با اسناد موجود می تواند یک کابوس باشد – مگر اینکه قبلاً یک متخصص ROS2 باشید.
برای بسیاری از بخشها، برای درک، به پیشنیازهای زیادی در ROS2 نیاز دارید که میتواند طاقتفرسا شود .
به همین دلیل، درک Navigation2 هفته ها یادگیری دردناک و ناامیدی را برای شما به همراه خواهد داشت.
این دقیقاً همان چیزی است که برای من اتفاق افتاده است. و من این را برای شما آرزو نمی کنم.
به همین دلیل است که من این دوره را ایجاد کردم:
میتوانید در ساعتهای بیشماری صرفهجویی کنید و پشته Navigation 2 را با حداقل دانش ROS2 به سادهترین روش ممکن یاد بگیرید.
به جای اینکه شما را در دریایی از مستندات بیاندازم، شما را راهنمایی می کنم تا ابتدا آزمایش کنید و سپس به روشی آرام به سمت درک عملی پیشرفت کنید.
برای واضح بودن، این دوره برای مبتدیان ROS2 کامل نیست، شما باید برخی از اصول ROS2 را داشته باشید.
اما پس از آن که اصول اولیه را داشته باشید، می توانید به راحتی دوره را دنبال کنید و Nav2 را به طور موثر یاد بگیرید.
هدف من این است که ناوبری را برای هر کسی با سطح پایه تا متوسط ROS2 در دسترس قرار دهم .
در دوره آموزش پشته ناوبری NAV2 در ROS2 از صفر شما:
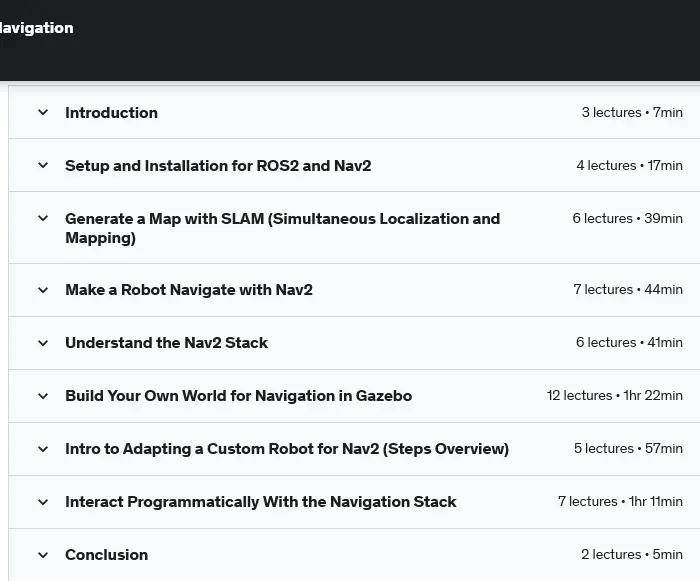
- ROS2 و پشته Navigation 2 را نصب کنید.
- ایجاد و ذخیره نقشه با SLAM (محلی سازی و نقشه برداری همزمان).
- با استفاده از این نقشه یک ربات بسازید که حرکت کند.
- بدانید که Navigation 2 چگونه کار می کند و اجزای مختلف پشته چیست: برنامه ریز جهانی، برنامه ریز محلی، رفتار بازیابی، TF ها و غیره.
- یک دنیای Gazebo سفارشی بسازید تا بتوانید شبیه سازی محیط خود را ایجاد کنید.
- مراحل تطبیق ربات خود را برای پشته Navigation 2 کشف کنید.
- با Nav2 با استفاده از Python Simple Commander API تعامل کنید.
- هر بخش بر روی قسمت های قبلی ساخته شده است، و آنچه را که آموخته اید با چالش های اضافی برای تمرین بیشتر تقویت خواهید کرد .
بنابراین، برای یادگیری پشته Navigation و صرفه جویی در ساعات بی شماری، دیگر منتظر نمانید و همین امروز در دوره ثبت نام کنید!
توجه – این دوره برای شما مناسب نیست اگر:
- شما یک مبتدی کامل ROS2 هستید. در این مورد، ابتدا باید مبانی ROS2 را یاد بگیرید
- شما می خواهید پشته Navigation 1 را برای ROS1 یاد بگیرید (نه دقیقاً یکسان)
دوره آموزش پشته ناوبری NAV2 در ROS2 از صفر برای چه کسانی است:
- توسعه دهندگان ROS که می خواهند یاد بگیرند که چگونه از پشته Navigation 2 استفاده کنند
- مهندسان/معلمان/محققان/هرکسی که علاقه مند به برنامه نویسی ربات های موبایل با سیستم عامل Robot 2 است
- هر کسی که مایل به یادگیری نحوه اجرای SLAM و ناوبری با استفاده از یک رویکرد ساده شده است
- هر کسی که در اسناد ناوبری ROS2 گم شده است
بخشی از دوره :



یودمی ایران –
دوره درخواستی خود را از راه های ارتباطی درخواست کنید