

توضیحات
آموزش کار با Moveit 2 در بازوهای رباتیک
نام دوره: ROS 2 Moveit 2 – Control a Robotic Arm
پیشنیازها
نصب Ubuntu 24.04 روی سیستم
آشنایی نسبی با ROS 2 (مفاهیمی مانند node، topic، خط فرمان، URDF و غیره)
اگر تازه با ROS 2 شروع کردهاید، بهتر است ابتدا دوره ROS 2 برای مبتدیان را بگذرانید
نیازی به سختافزار واقعی نیست؛ کل دوره را میتوان با شبیهسازی دنبال کرد
توضیحات دوره
اگر اصول اولیه ROS 2 را یاد گرفتهاید و حالا میخواهید روی بازوهای رباتیکی با MoveIt 2 کار کنید، این دوره برای شما طراحی شده است.
شاید هم قبلاً شروع کردهاید اما احساس میکنید مسیر کار با MoveIt 2 پیچیده و گیجکننده است.
در این دوره یاد میگیرید چگونه یک بازوی رباتیکی را از صفر برای استفاده با MoveIt 2 پیکربندی کنید و یک پروژه کامل بسازید. در پایان دوره میتوانید همین دانش را در پروژههای واقعی خودتان به کار ببرید.
چرا این دوره؟
یادگیری MoveIt 2 میتواند دشوار باشد؛ معمولاً مشخص نیست از کجا باید شروع کرد، چگونه تنظیمات را انجام داد یا چگونه آن را در یک پروژه ROS 2 ادغام کرد. مستندات آنلاین نیز اغلب فرض میکنند شما از قبل دانش زیادی دارید.
در این دوره،
آموزش کار با Moveit 2 در بازوهای رباتیک ۶ محوره که در یک استارتاپ واقعی توسعه داده شده، بهصورت گامبهگام در اختیار شما قرار میگیرد.
هدف این دوره ارائه یک راهنمای کامل برای راهاندازی و کنترل بازوی رباتیکی با MoveIt است.
بهجای استفاده از یک ربات آماده، شما یک بازوی رباتیکی ۶ محوره سفارشی را از ابتدا طراحی و پیادهسازی میکنید تا بتوانید همین فرآیند را در پروژههای خودتان تکرار کنید.
روش آموزش
روش تدریس این دوره بر سه اصل استوار است:
آموزش گامبهگام
تمرکز روی نکات اصلی و کاربردی
یادگیری از طریق انجام پروژه
در این دوره فقط مراحل را تکرار نمیکنید؛ دلیل انجام هر مرحله را نیز درک خواهید کرد.
در دوره آموزش کار با Moveit 2 در بازوهای رباتیک چه چیزهایی یاد میگیرید؟
این دوره کاملاً پروژهمحور است و از یک پروژه خالی شروع میشود.
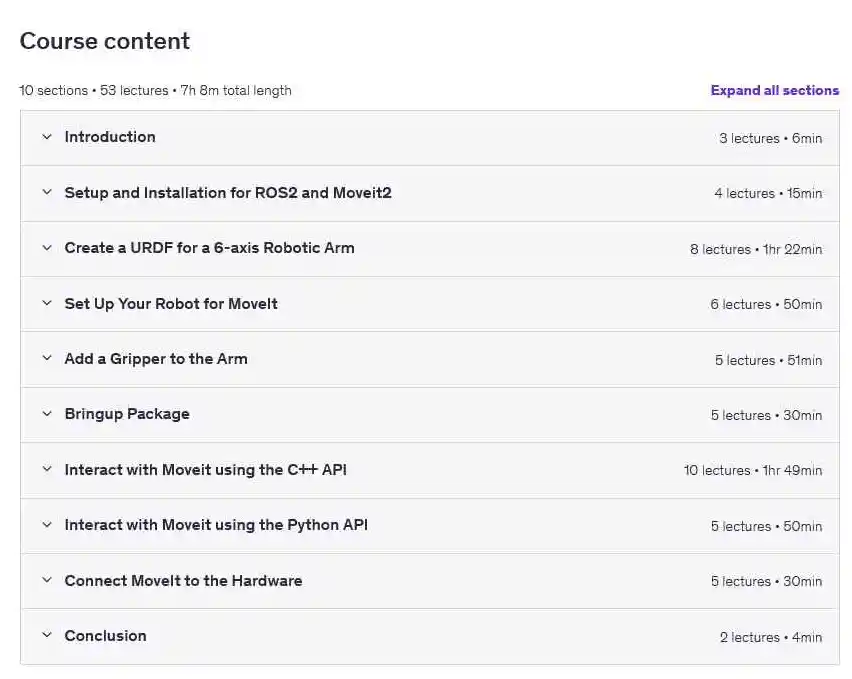
در طول دوره شما:
ROS 2 و MoveIt 2 را نصب میکنید
برای یک بازوی رباتیکی ۶ محوره URDF میسازید
ربات را با MoveIt Setup Assistant پیکربندی میکنید
یک gripper به بازوی ربات اضافه میکنید
یک bringup package همراه با launch file ایجاد میکنید
بازو و gripper را با MoveIt API در C++ و Python کنترل میکنید
نحوه اتصال MoveIt به سختافزار واقعی با استفاده از ros2_control را یاد میگیرید
هر بخش بر اساس بخش قبلی ساخته شده و تمرینها و چالشهایی برای تثبیت یادگیری ارائه میشود. همچنین در پایان هر بخش میتوانید کد پروژه را دانلود کرده و بهعنوان قالب پروژههای خود استفاده کنید.
اگر میخواهید کنترل بازوی رباتیکی با ROS 2 و MoveIt 2 را بهصورت عملی یاد بگیرید، این دوره مسیر کاملی در اختیار شما قرار میدهد.
دوره آموزش کار با Moveit 2 در بازوهای رباتیک مناسب چه کسانی است؟
توسعهدهندگان ROS که میخواهند MoveIt2 را یاد بگیرند
افرادی که در مستندات MoveIt در ROS 2 دچار سردرگمی شدهاند
مهندسان، پژوهشگران و مدرسانی که به کنترل بازوهای رباتیکی با ROS 2 علاقه دارند



یودمی ایران –
دوره درخواستی خود را از راه های ارتباطی درخواست کنید