

توضیحات
آموزش اتصال برنامه ROS 2 به سخت افزار با ros2_control
نام دوره : ROS 2 – Hardware and ros2_control, Step by Step
پیشنیازها
این دوره برای مبتدیان کامل ROS 2 مناسب نیست. شما باید با C++، نودها، ارتباطات، پارامترها، launch fileها، URDF، RViz و سایر مفاهیم ROS 2 آشنا باشید.
اگر تازه با ROS 2 شروع کردهاید، بهتر است ابتدا دوره ROS2 برای مبتدیان را بگذرانید.
برای شرکت در این دوره باید Ubuntu و ROS روی سیستم شما نصب شده باشد.
توضیحات دوره
شما ROS 2 را یاد گرفتهاید و حالا این سؤال برایتان پیش آمده که چگونه اپلیکیشن ROS 2 خود را به سختافزار واقعی متصل کنید؟ پاسخ این سؤال استفاده از ros2_control است.
اگر یادگیری ros2_control را شروع کردهاید اما احساس سردرگمی میکنید، کاملاً طبیعی است.
این دوره دقیقاً برای حل همین مشکل طراحی شده است. در پایان دوره میتوانید ربات و سختافزار خود را با ros2_control یکپارچه کنید.
چرا این دوره؟
یادگیری ros2_control در ابتدا میتواند بسیار دشوار باشد؛ منابع آموزشی آنلاین محدود هستند، مثالها پیچیدهاند و مستندات اغلب بهگونهای نوشته شدهاند که انگار فقط توسعهدهندگان اصلی پروژه قادر به درک آن هستند.
این موضوع باعث میشود حتی توسعهدهندگان باتجربه ROS هم زمان زیادی را صرف آزمونوخطا کنند.
این دوره بر اساس چندین سال تجربه عملی طراحی شده تا شما بتوانید ros2_control را به سادهترین و سریعترین شکل ممکن یاد بگیرید.
بهجای غرق شدن در مستندات، همهچیز را از صفر، مرحلهبهمرحله و همراه با پروژههای عملی یاد خواهید گرفت. از آنجا که ros2_control مستقیماً با سختافزار مرتبط است، در پروژههای این دوره از سختافزار واقعی استفاده میشود.
توجه: این دوره برای مبتدیان ROS 2 مناسب نیست و نیاز به دانش پایه ROS 2 و C++ دارد.
روش تدریس
روش تدریس این دوره شامل:
آموزش گامبهگام
تمرکز روی نکات مهم و کاربردی
یادگیری از طریق انجام پروژه
همچنین تأکید ویژهای بر درک دلیل انجام هر مرحله وجود دارد، نه صرفاً تکرار دستورات.
در دوره آموزش اتصال برنامه ROS 2 به سخت افزار با ros2_control چه چیزهایی یاد میگیرید؟
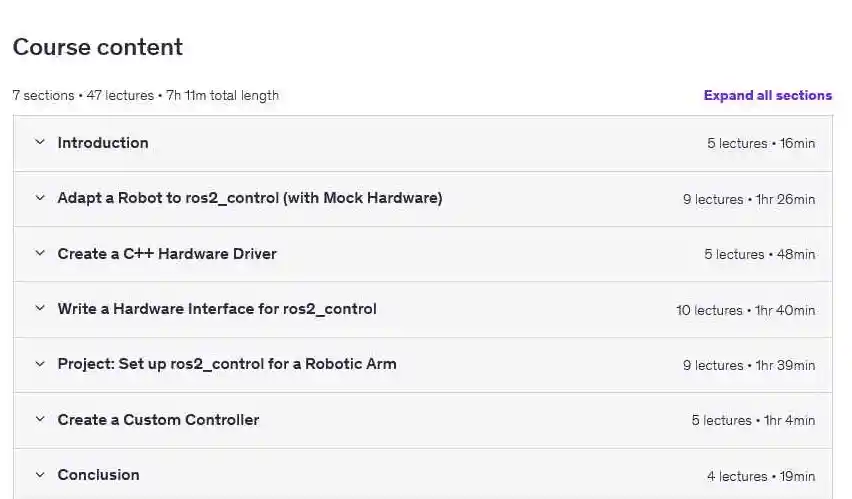
در این دوره مسیر یادگیری بهصورت تدریجی طراحی شده تا بتوانید اجزای ros2_control را بدون احساس پیچیدگی درک کنید.
در طول دوره شما:
یک pipeline کامل ros2_control با استفاده از یک URDF آماده راهاندازی میکنید
URDF را برای ros2_control تطبیق میدهید
پارامترهای controller را در فایل YAML تعریف میکنید
یک launch file برای اجرای سیستم مینویسید
بهترین روشهای نوشتن driver سختافزار با C++ را یاد میگیرید
driver را در یک نود ROS 2 ادغام میکنید
یک hardware interface برای ros2_control مینویسید
در یک پروژه پیشرفتهتر، یک mobile base را با یک بازوی رباتیکی ترکیب میکنید
یک controller سفارشی ایجاد میکنید
تمامی مثالها با کدهای ساده و تمیز ارائه میشوند و میتوانید کد هر بخش را دانلود کرده و بهعنوان قالب پروژههای خود استفاده کنید.
دوره آموزش اتصال برنامه ROS 2 به سخت افزار با ros2_control مناسب چه کسانی است؟
توسعهدهندگان ROS که میخواهند ros2_control را بهصورت ساختاریافته یاد بگیرند
افرادی که در مستندات ros2_control دچار مشکل شدهاند
مهندسان، دانشجویان و پژوهشگران رباتیک که با نرمافزار و سختافزار در ROS 2 کار میکنند
حتی اگر فقط با شبیهسازی Gazebo کار میکنید، ros2_control برای شما بسیار مفید خواهد بود



یودمی ایران –
دوره درخواستی خود را از راه های ارتباطی درخواست کنید